rasa(task bot)
所谓对话系统,是通过对话的方式,实现人机交互的一种方法。
Rasa是一家通过机器学习技术实现对话系统、机器人开发的工具,同时也是一家创业公司。
Rasa的组成
Rasa NLU
主要实现自然语言理解(即NLU)功能,本质上就是识别句子的意图和实体。
如“买一张去北京的票”,我们可以定义一个意图是“购票”,实体是“北京”和“一张”。
意图识别本质是短文本分类任务(当然在学术界可能称为Intent Detection来和Text Classification分开)。单纯短文本分类任务的SOTA基本上就是BERT了。
抽取本质是信息抽取任务。抽取的SOTA现在一般还是BiLSTM-CRF的各种变型,或BERT之类。
现在学术界的主要研究方向是多种工作结合,例如同一模型同时做意图识别和信息抽取,互相配合增加总体准确率。
Rasa的NLU,主要是当前的社区版,主要还是使用了各种开源技术,并没有追求学术上的SOTA。它使用的工具包括Spacy、sklearn-crfsuite
Rasa Core
这是Rasa的核心部分,NLU有各种实现,开源的也有snips nlu等,但是core却独一无二。
Rasa Core主要完成了基于故事的对话管理,包括解析故事并生成对话系统中的对话管理模型(Dialog Management),输出系统决策(System Action/System Policy)。
学术上一般认为这部分会包含两个模型
1、对话状态跟踪(Dialog State Tracking / Belief Tracking)
2、对话策略(Dialog Policy / Policy Optimization)
对于1.其实Rasa实现很简单,具体在它的论文 Few-Shot Generalization Across Dialogue Tasks, Vlasov et at., 2018 中说的比较具体。就是简单的基于策略的槽状态替换。
对于2.Rasa使用基于LSTM的Learn to Rank方法,大体上是将当前轮用户意图、上一轮系统行为、当前槽值状态向量化,然后与所有系统行为做相似度学习,以此决定当前轮次的一个或多个系统行为
Rasa 的 Pipeline
Pipeline 的过程是这样的:
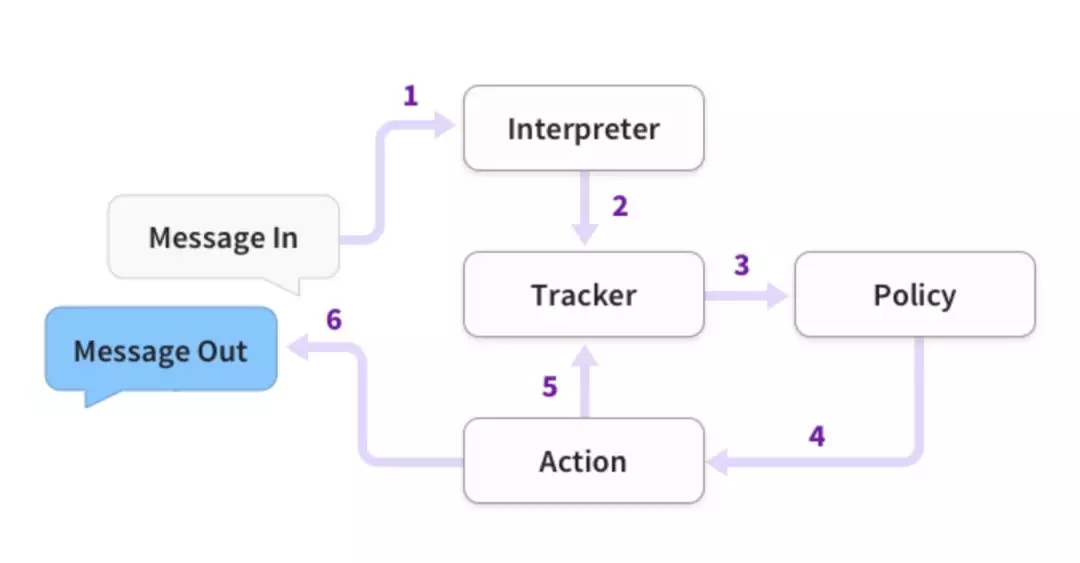
1、用户输入文字,送入解释器,即Rasa NLU
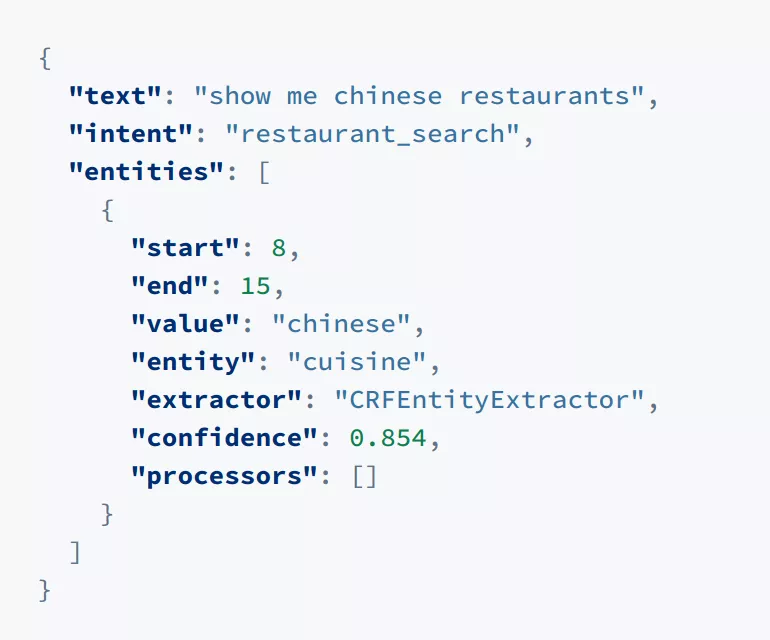
2、NLU给出结果,如图
3、从Tracker到Policy,Tracker用于跟踪对话状态,Tracker输出的是Embedding
用户意图的Embedding
系统动作(上一步)的Embedding
实体(槽值/Slot)的Embedding
4、Policy给出系统行为
5、Tracker记录系统行为,下一次会提供给Policy使用
6、返回消息给用户

